
[ad_1]
If you happen to’ve ever gone mountaineering, you already know trails may be difficult and unpredictable. A path that was clear final week is likely to be blocked at the moment by a fallen tree. Poor upkeep, uncovered roots, free rocks, and uneven floor additional complicate the terrain, making trails troublesome for a robotic to navigate autonomously. After a storm, puddles can type, mud can shift, and erosion can reshape the panorama. This was the elemental problem in our work: how can a robotic understand, plan, and adapt in actual time to soundly navigate mountaineering trails?
Autonomous path navigation is not only a enjoyable robotics downside; it has potential for real-world impression. In the US alone, there are over 193,500 miles of trails on federal lands, with many extra managed by state and native companies. Tens of millions of individuals hike these trails yearly.
Robots able to navigating trails may assist with:
- Path monitoring and upkeep
- Environmental information assortment
- Search-and-rescue operations
- Aiding park employees in distant or hazardous areas
Driving off-trail introduces much more uncertainty. From an environmental perspective, leaving the path can harm vegetation, speed up erosion, and disturb wildlife. Nonetheless, there are moments when staying strictly on the path is unsafe or unimaginable. So our query grew to become: how can a robotic get from A to B whereas staying on the path when doable, and intelligently leaving it when crucial for security?
Seeing the world two methods: geometry + semantics
Our principal contribution is dealing with uncertainty by combining two complementary methods of understanding and mapping the surroundings:
- Geometric Terrain Evaluation utilizing LiDAR, which tells us about slopes, top modifications, and huge obstacles.
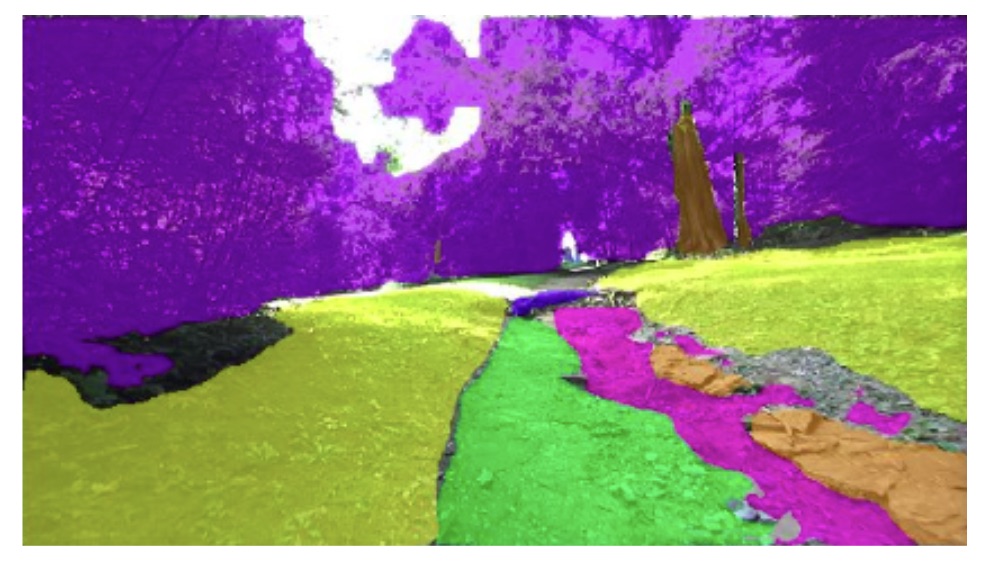
- Semantic-based terrain detection, utilizing the robotic digital camera photos, which tells us what the robotic is taking a look at: path, grass, rocks, tree trunks, roots, potholes, and so forth.
Geometry is nice for detecting large hazards, however it struggles with small obstacles and terrain that appears geometrically comparable, like sand versus agency floor, or shallow puddles versus dry soil, which might be harmful sufficient to get a robotic caught or broken. Semantic notion can visually distinguish these instances, particularly the path the robotic is supposed to comply with. Nevertheless, camera-based methods are delicate to lighting and visibility, making them unreliable on their very own. By fusing geometry and semantics, we get hold of a much more strong illustration of what’s protected to drive on.
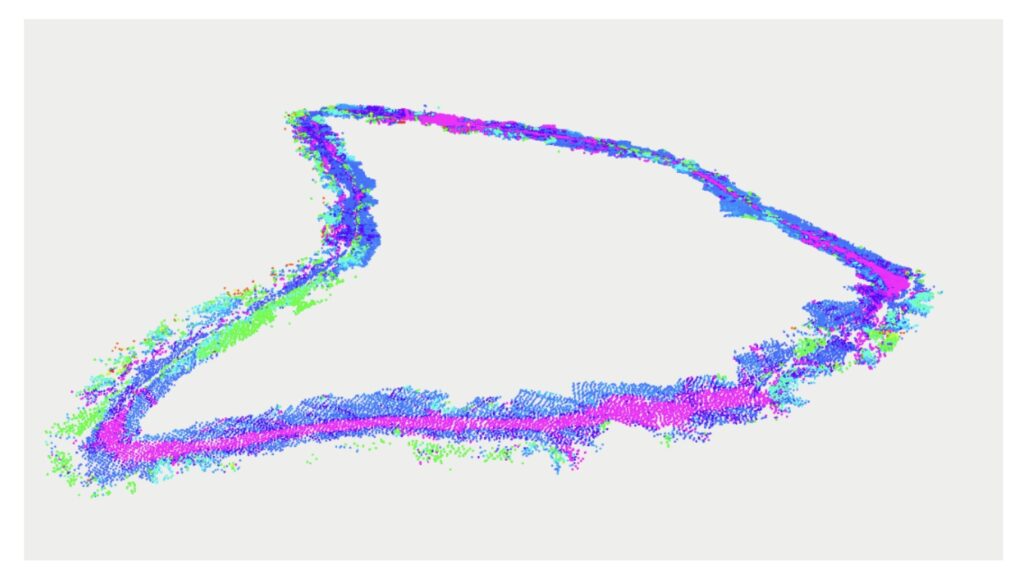
We constructed a mountaineering path dataset, labeling photos into eight terrain courses, and skilled a semantic segmentation mannequin. Notably, the mannequin grew to become superb at recognizing established trails. These semantic labels have been projected into 3D utilizing depth and mixed with the LiDAR based mostly geometric terrain evaluation map. Utilizing a twin k-d tree construction, we fuse all the pieces right into a single traversability map, the place every level in area has a price representing how protected it’s to traverse, prioritizing path terrain.
The following step is deciding the place the robotic ought to go subsequent, which we handle utilizing a hierarchical planning strategy. On the world degree, as a substitute of planning a full path in a single cross, the planner operates in a receding-horizon method, constantly replanning because the robotic strikes by the surroundings. We developed a customized RRT* that biases its search towards areas with increased traversability likelihood and makes use of the traversability values as its price operate. This makes it efficient at producing intermediate waypoints. A neighborhood planner then handles movement between waypoints utilizing precomputed arc trajectories and collision avoidance from the traversability and terrain evaluation maps.
In apply, this makes the robotic desire staying on the path, however not cussed. If the path forward is blocked by a hazard, comparable to a big rock or a steep drop, it may quickly route by grass or one other protected space across the path after which rejoin it as soon as situations enhance. This habits seems to be essential for actual trails, the place obstacles are widespread and infrequently marked upfront.
We examined our system on the West Virginia College Core Arboretum utilizing a Clearpath Husky robotic. The video under summarizes our strategy, displaying the robotic navigating the path alongside the geometric traversability map, the semantic map, and the mixed illustration that finally drives planning choices.
Total, this work exhibits that robots don’t want completely paved roads to navigate successfully. With the precise mixture of notion and planning, they’ll deal with winding, messy, and unstructured mountaineering trails.
What’s subsequent?
There’s nonetheless loads of room for enchancment. Increasing the dataset to incorporate completely different seasons and path varieties would enhance robustness. Higher dealing with of maximum lighting and climate situations is one other essential step. On the planning facet, we see alternatives to additional optimize how the robotic balances path adherence towards effectivity.
If you happen to’re curious about studying extra, try our paper “Autonomous Mountain climbing Path Navigation through Semantic Segmentation and Geometric Evaluation”. We’ve additionally made our dataset and code open-source. And for those who’re an undergraduate pupil curious about contributing, maintain an eye fixed out for summer season REU alternatives at West Virginia College, we’re all the time excited to welcome new folks into robotics.
tags: IROS

Christopher Tatsch
– PhD in Robotics, West Virginia College.
[ad_2]

