

{kind=link}
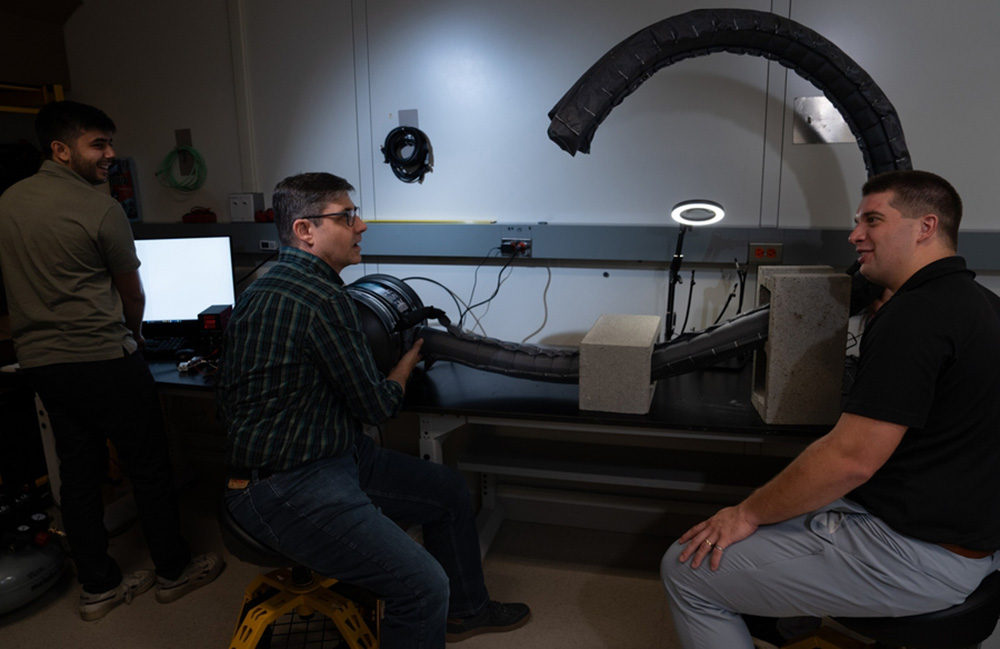
From left to proper: Analysis intern Ankush Dhawan and Lincoln Laboratory employees members Chad Council and Nathaniel Hanson take a look at a vine robotic in a laboratory setting. | Supply: Glen Cooper, MIT Information
Researchers on the MIT Lincoln Laboratory, in collaboration with the College of Notre Dame, have created a vine-like robotic that may squeeze between rubble. The robotic may ease emergency responders’ burden following disastrous structural collapses.
When a significant catastrophe hits, emergency responders are accountable for looking for individuals trapped below rubble and thoroughly extricating these victims from harmful environments. This grueling, around-the-clock work can stretch for days or perhaps weeks, relying on the scale of the catastrophe.
Whereas legged robots are already working in disaster-recovery conditions to survey the tops of rubble, they are often broken in tight, unstable areas. The joint analysis staff created the Smooth Pathfinding Robotic Remark Unit, or SPROUT. This new system can maneuver round obstacles and thru small areas.
The gentle robotic can inflate and deflate with air to wriggle its method below collapsed constructions. The MIT–Notre Dame researchers mentioned emergency responders can remotely management it to discover, map, and discover optimum ingress routes by means of particles. It is usually designed to be low price and straightforward to function.
“The city search-and-rescue atmosphere may be brutal and unforgiving, the place even probably the most hardened expertise struggles to function,” Chad Council, a member of the SPROUT staff and technical employees member at Lincoln Laboratory, instructed MIT Information. “The basic method a vine robotic works mitigates a whole lot of the challenges that different platforms face.”
SPROUT was developed in collaboration with Margaret Coad, a professor on the College of Notre Dame and an MIT graduate. When searching for collaborators, Nathaniel Hanson — a graduate of Notre Dame and the chief of the group — was already conscious of Coad’s work on vine robots for industrial inspection.
The design challenges MIT confronted with SPROUT
SPROUT is made up of an inflatable tube of hermetic material. The tube unfurls from a set base with a motor that controls the deployment. On the tip of the tube, the staff mounted a digicam and different sensors. Because the tube inflates, it expands into rubble, squeezing by means of tight passages, whereas its sensors picture and map the atmosphere.
At present, SPROUT may be operated utilizing joysticks and a display that shows the robotic’s digicam feed. It may deploy as much as 10 ft. (3 M), and the staff is engaged on increasing it to 25 ft. (7.6 m).
SPROUT’s versatile design makes it able to moving into small areas, nevertheless it additionally offered quite a few technical challenges for the researchers. For instance, the staff needed to create a management system that might pinpoint methods to apply air stress throughout the deformable robotic in order that it strikes the place the operator is directing it to go.
As well as, the staff needed to design the tube to reduce friction whereas the robotic grows and engineer the controls for steering.

Register now so you do not miss out!
Constructing maps of collapsed areas and testing SPROUT
The MIT staff mentioned it has been discovering new methods to use its cellular robotic to disaster-relief efforts, like utilizing knowledge captured by the teleoperated system to construct maps of subsurface voids.
“Collapse occasions are uncommon however devastating occasions,” Hanson mentioned. “In robotics, we’d sometimes need ground-truth measurements to validate our approaches, however these merely don’t exist for collapsed constructions.”
To unravel this downside, Hanson and his staff made a simulator that enables them to create practical depictions of collapsed constructions and develop algorithms that map void areas.
Lincoln Laboratory examined SPROUT with first responders on the Massachusetts Process Power 1 coaching website in Beverly, Mass. The assessments allowed the researchers to enhance the sturdiness and portability of the robotic and discover ways to develop and steer the robotic extra effectively. The staff is planning a bigger area research this spring.
“City search-and-rescue groups and first responders serve essential roles of their communities however sometimes have little-to-no analysis and growth budgets,” mentioned Hanson. “This program has enabled us to push the expertise readiness degree of vine robots to some extent the place responders can interact with a hands-on demonstration of the system.”
Sensing in constrained areas is just not an issue distinctive to disaster-response communities, he added. The staff envisions the expertise getting used within the upkeep of navy techniques or essential infrastructure with difficult-to-access areas. The preliminary program centered on mapping void areas, however future work goals to localize hazards and assess the viability and security of operations by means of rubble.

Chad Council navigates the robotic by means of rubble on the Massachusetts Process Power 1 website. | Supply: MIT Researcher
{kind=link}